利用“自适应曲线轨迹”,驾驶员能够记录人工驾驶的曲线路径。
记录了初始道后,每一个附加的道都是根据前一道生成,以此确保整个农田的转向误差不会传播。生成的这些道与初始道并不完全相同。为了使道对道的精度保持不变,需要改变道的曲率。如有必要,驾驶员可在农田的任何位置改变曲线路径,只需将机器驶离传播路径。
驾驶员可以使用平行追踪功能在生成的导航轨迹上手动驾驶,或者在记录初始道且显示传播路径后接合 AutoTrac。
如果曲线记录会话停止,机器前方的轨迹没有投射,驾驶员只能在前一个记录会话的可用的轨迹上使用 AutoTrac。结束记录会话会将会话中记录的所有曲线线段保存为单个轨迹。
当编辑导航轨迹时,可以将附加的曲线线段添加到现有的适应性曲线轨迹上。
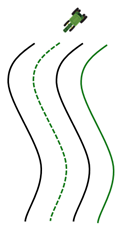
记录会话 — 在记录会话中,可在投射或记录的轨迹上使用 AutoTrac。在记录会话中,当机器在 0.5 至 1.5 轨迹间距范围内时,会投射一条平行路径。如果机器在黑线范围内,并且与以前记录的线的端点成一条直线,则会投射出一条线,如图所示:
|
|
记录的轨迹 |
|
|
0.5 和 1.5 轨迹间距 |
|
|
投射的轨迹 |
|
|
|
可按下“记录”按钮手动记录轨迹,或使用 AutoTrac 自动记录轨迹。要更改记录方法,在导航设置中更改曲线记录触发器。选择 AutoTrac 后,可随时选择“记录”按钮开始手动记录。
要修改轨迹,转至编辑导航轨迹,然后选择坐标选项卡,将线段添加到自适应曲线上。
直线线段 — 可创建的最长线段为 0.8 公里(0.5 英里)。如果距离大于该值,轨迹段无法连接,导致路径出现缺口。
活动轨迹 — 当轨迹处于活动状态时,AutoTrac 可以使用之前记录的导航轨迹。
偏移 — 偏移轨迹可用于自适应曲线,但建议不要使用。轨迹偏移取决于轨迹上的当前首向,而不是取决于整个轨迹的几何形状。变换轨迹可能导致轨迹的部分片段向远处或向近处偏离预期。“变换轨迹”不能补偿自适应曲线轨迹模式下的固有 GPS 漂移。
注:在自适应曲线轨迹模式下,空道不可用。
注:在自适应曲线轨迹模式下,可以显示“小半径曲线”和“路径末端”信息。
注:自适应曲线轨迹数据的轨迹间距恒定不变。如果在返回农田时使用了不同的农具宽度,则必须记录新数据。