目录
目录
目录
目录
微调增量表示每按一次微调箭头,跟随者机器移动的距离。
注:引领者和跟随者机器能够设置不同的微调增量值。
|
更改向前/向后微调增量。 |
|
|
更改向左/向右微调增量。 |
|
|
选择该选项启用田间数据共享. |
|
速度灵敏度决定着跟随者机器加速和减速的力度,以便与引领者机器的速度相匹配。
设置值越大: 导致速度变化的力度越大。设置值太高,会导致在引领者机器匀速时出现周期性加速和减速。
设置值越小: 导致速度变化的力度越小。设置值太小,对引领者机器速度变化的响应速度越慢。
速度灵敏度建议
配备 PST 变速箱的 6、7 和 8 系列拖拉机 — 开始时将速度灵敏度设置为 1,以减少速度波动。
配备 IVT 或 PST 变速箱的拖拉机 — 将“AutoTrac 行灵敏度 — 前进方向”设置为 50,以减少 S 形(蛇行)运动。
注:这些速度灵敏度设置是推荐的起始点。不同的机器,性能可能会有所不同。进行必要的调整,优化机器性能。
|
提高速度灵敏度。 |
|
|
降低速度灵敏度。 |
|
当启用了声响报警器时,在微调跟随者机器的位置或生成初始点时,引领者和跟随者机器都会发出报警声。
注:引领者和跟随者机器分别启用报警。
|
启用声响报警器。 |
|
|
编辑网络 — 查看和编辑网络。 |
|
|
操作拖拉机时,选择描述拖拉机角色的收音机按键:
|
|
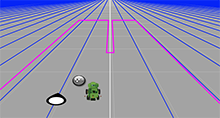
当受控交通模式启用后,跟随者机器在导航线上行驶,同时它的速度由引领者机器控制。如果初始点不在导航线上,则跟随者机器沿着与初始点平行的轨迹行驶,同时保持在导航线上。
|
打开和关闭受控交通模式。 |
开/关 |
当使用受控交通模式时,按下 AutoTrac 复位开关,跟踪处于活动状态的导航轨迹。当跟随者机器在作业区时,再按一次 AutoTrac 复位开关,使其速度与引领者机器同步。
注:当“受控交通模式”启用后,左、右微调被禁用。
当启用了保存的“微调”,并且跟随者机器返回到了工作区时,跟随者机器返回到其被微调的位置,而不是返回到原来的初始点。
|
打开或关闭“保存微调结果用于下一次连接”。 |
开/关 |
当启用了多个初始点时,驾驶员最多可以使用三个不同的初始点。
|
打开或关闭“多个初始点”。 |
开/关 |
|
操作区前边缘 — 输入从引导机接收器到操作区前边缘的距离。 默认值是 25 米(82 英尺)。 |
操作区前边缘 |
|
操作区后边缘 — 输入从引导机接收器到操作区后边缘的距离。 默认值是 20 米(65.6 英尺)。 |
操作区后边缘 |
|
|
|
|
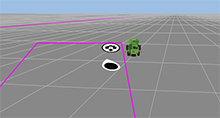
左侧操作区域 |
U 形操作区域 |
当“设备管理器”中的机器型式设置为“联合收割机”、“收获机”或“其他”时,“机器同步”默认为是左侧工作区。所有其他机器型式均默认为是“U 形工作区”。当“U 形工作区超控”打开时,工作区为 U 形。当“U 形工作区超控”在“关闭”状态时,工作区仅位于机器左侧。
|
打开或关闭 “U 形工作区超控”。 |
开/关 |
注:如果引导机是联合收割机,则 U 形操作区超控开关将灰显。
工作区内部宽度确定 U 形工作区的缩进部分的宽度。
工作区内部长度确定 U 形工作区的缩进部分的长度。