此值通常设置为 0.0,除非 GPS 监视器向左或向右偏移机器中心线。如果机器(无机具)存在道与道之间的 AutoTrac 精度问题,操作员也可能调整该值。在这种情况下,使用以下程序测量所有机器型式的 GPS 横向偏移。
注:在调整该设置前,检查确认 GPS 接收器 TCM 标定、轮胎充气压力和机器配重适当。如不执行此检查,可能导致测量结果不准确。
断开农具的连接,或从地上拆下农具。农具不得影响机器运动。
设置一条直线轨迹导航轨迹。
接合 AutoTrac 并沿轨迹行驶。在几个点处停下,用旗标标识机器的中心(牵引杆)。
掉头并在同一轨迹的相反方向接合 AutoTrac 并驾驶。在各个旗标处停下。
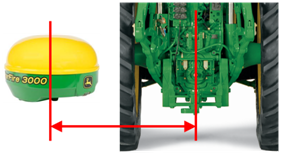
测量机器中心与各个旗标之间的距离。如果这是道与道之间的问题,则在整道中的各个旗标位置,距离应基本相等。
如果这些测量值在宣传的系统精度范围内(SF1、SF2、SF3、SF-RTK、RTK),则不要更改此偏移。而是检查机具横向偏移。
否则,将此测量值除以二,即可得出 GPS 横向偏移。
注:如果需要驾驶拖拉机向它的当前路径的右侧行驶,则在显示器上将偏移方向切换至向右。将拖拉机图像上的 GPS 接收器移至中心线的右侧。
重复第 2 至第 4 步,确定偏移量和方向是否设置正确。