更多工作原理,请参阅机具简要表概述。
注:在配置机具配置文件设置之前,先在 ISOBUS VT 中设置耕耘机具。
连接类型或悬挂架用来描述农具与机器的挂接方法,并用来控制显示器如何判断农具在机器后面的运动情况。
注:连接偏移测量值输入到机器简要表中。
以下应用需要“连接类型”设置:
地图
组控制
作业设置
|
|
牵引杆 |
|
后部 3 点 |
|
|
前部 3 点 |
|
拖车悬挂架 |
|
|
球形 |
|
U 形钩 |
|
|
挂架钩 |
|
钢锥 |
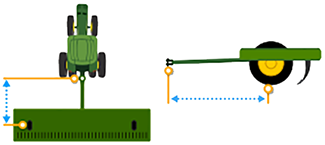
 横向偏移
横向偏移从机器中心点到机具工作宽度中心点的横向距离。
以下应用程序需要使用“横向偏移”设置:
地图
导航
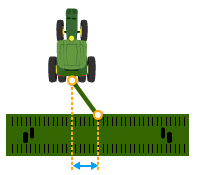
处于工作位置时,连接(或枢轴)点到机具旋转中心的直线距离。这通常是机具与地面接触的负荷承载部件。
旋转中心偏移很重要,它关系到能否对机具绕曲线的牵引作用进行精确建模。
注:如果连接类型设置为前 3 点或非回转式后 3 点,则不需要此偏移。
以下应用需要“旋转中心”设置:
地图
组控制
作业设置
导航
AutoTrac 转弯自动化
注:当农具机具结合时,测量旋转中心。
注:只有在使用某些机具时,才能看到这些尺寸。
尺寸由机具提供,不能编辑。以下测量值由机具填充:
横向偏移
旋转中心
直线偏移
宽度
长度
入土转弯半径
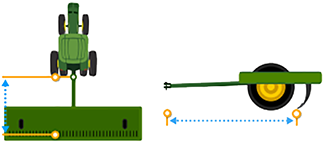
从连接点到施用产品或工作位置之间的直线距离。例如,被耕耘的地面。
以下应用程序需要使用“作业点”设置:
地图
组控制
作业设置
"机械延迟"指的是发出了"接通"或"关闭"指令后工具到达地面所需的平均时间。机器、农具和显示器组合不同,该设置可能会有所不同。
以下应用需要“机械延迟”设置:
地图
组控制
作业设置
添加机具接收器或编辑接收器偏移
|
选择添加接收器支座按钮,添加机具接收器。 |
|
选择接收器偏移,编辑农具接收器偏移。







