重要提示:为优化机具导航功能,需测量机具旋转中心。旋转中心测量不准确会导致农具性能不佳或农具损坏。关于如何精确测量旋转中心,参见测量旋转中心中的说明。
![]()
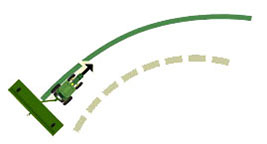
确定 AutoTrac 对机具横向误差的响应力度。
设置值越大:对农具偏离轨迹误差的响应力度越大。
设置值越小:对农具偏离轨迹误差的响应力度越小。
范围:50—200
|
行敏感度追踪低 |
|
|
行敏感度追踪高 |
|
确定 AutoTrac 对机具首向误差的响应力度。
设置值越大:对农具首向误差的响应力度越大。
设置值越小:对农具首向误差的响应力度越小。
范围:50—200
|
行敏感度进向低 |
|
|
行敏感度进向高 |
|
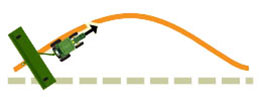
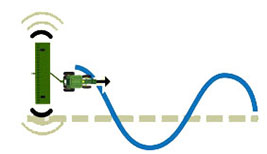
确定机器采集轨迹的力度。此设置仅影响采集轨迹的性能。
设置值越大:对路线获取的响应越敏感。
设置值越小:对线获取越不激烈。
范围:50—200
|
采集敏感度低 |
|
|
采集敏感度高 |
|
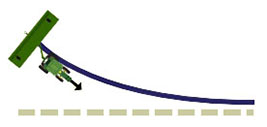
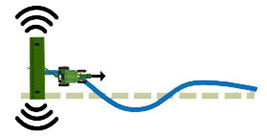
确定 AutoTrac 响应轨迹曲线的力度。此设置只会影响曲线轨迹导航的性能。
设置值越大:车轮围绕曲线转弯的半径越小(转弯越急)。
设置值越小:车辆围绕曲线转弯的半径越大。
范围:50—200
|
曲线敏感度低 |
|
|
曲线敏感度高 |
|
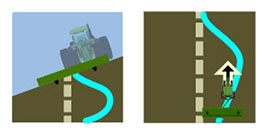
确定 AutoTrac 对坡度变化的响应力度。值过高,拖拉机操纵机具上坡。值过低,拖拉机操纵农具下坡。
设置值越大:机器在斜坡上以较高的值行驶,当农具顺坡下滑的阻力较小时,可以对农具进行补偿。
设置值越小:机器在斜坡上以较低的值行驶,当农具顺坡下滑的阻力较大时,可以对农具进行补偿。
范围:范围:50—200
注:如果土壤条件发生变化,需调整此设置。
|
坡度灵敏度低 |
|
|
坡度灵敏度高 |
|
确定 AutoTrac 对坡度变化的响应速度。
设置值越大:对坡度变化的响应越迅速。
设置值越小:对坡度变化的响应越缓慢。
范围:50—200
|
坡度响应速率低 |
|
|
坡度响应速率高 |
|