 第 1 步:校准前提条件
第 1 步:校准前提条件完成以下步骤执行 RowSense Vision 传感器标定。
第 1 步:校准前提条件确保满足以下前提条件:
AutoTrac Vision 摄像头已安装并可用。
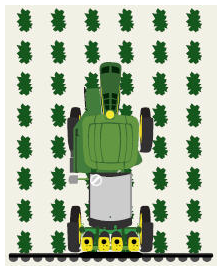
喷雾器位于站立作物间。
喷药机与作物行平行。
车轮位于行的中间。
|
选择下一步按钮,进入第 2 步。 |
下一步 |
|
选择取消按钮,返回 AutoTrac Vision 传感器标定页面。 |
取消 |
输入行间距以及摄像头高度尺寸,提高传感器的准确度。
摄像头高度 — 测量从摄像头窗口底部到地面之间的距离。
行间距 — 测量作物行之间的距离。
|
选择下一步按钮,进入第 3 步。 |
下一步 |
RowSense 处理第 2 步中输入的信息。
此步骤自动前进至第 4 步。
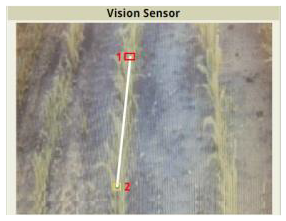 第 4 步:目标作物行
第 4 步:目标作物行在作物行上对正目标线。
|
使用箭头按钮定位点 1 和点 2。 |
|
|
选择下一步按钮,进入第 5 步。 |
下一步 |
RowSense 处理第 4 步中输入的信息。
此步骤自动前进至第 6 步。
在两条笔直的行中间行驶。随着机器的移动,标定进度条逐渐填充。继续行驶,直至状态条完全填满。
注:标定过程中,机器必须向前行驶(不能倒车),以免标定失败。
注:标定程序进行时,可能出现产品喷施现象。
此步骤自动前进至第 7 步。
视觉传感器标定成功。
|
选择确认按钮,返回 视觉传感器标定页。 |
确认 |
按照屏幕上的指示排除错误。
|
选择 重试 按钮,重复校准过程。 |
重试 |
|
选择取消按钮返回视觉传感器页。 |
取消 |