![]()
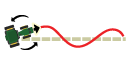
确定 AutoTrac 对横向误差的响应力度。
设置值越大:对机器偏离轨迹误差的响应越激烈。
设置值越小:对机器偏离轨迹误差的响应越不激烈。
范围:50—200
|
|
行敏感度追踪低 |
|
|
行敏感度追踪高 |
确定 AutoTrac 对前进方向误差响应的敏感度。
设置值越大:对机器进向误差的响应越敏感。
设置值越小:对机器首向误差的响应越不激烈。
范围:50—200
|
|
行敏感度进向低 |
|
|
行敏感度进向高 |
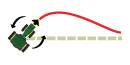
确定偏航率(车辆掉头速度)对循迹性能的影响。首向提前量起着“朝前看”参数的作用,可用来最大程度地减小过度转向。调整越大,性能就越差。
设置值越大:对偏航速度的响应越激烈。
设置值越小:对偏航速度的响应越不激烈。
范围:50—200
|
|
进向提前量低 |
|
|
进向提前量高 |
调整机器转向速度,以保持循迹运行的性能。提高转向响应度通常可以改善循迹运行的性能。
设置值越大:跟踪性能更佳,但车辆运动或抖动行为可能增加。
设置值越小:车辆运动降低,但跟踪性能可能更差。
范围:50—200
|
|
转向响应低 |
|
|
转向响应高 |
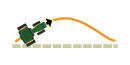
确定机器采集轨迹的力度。此设置仅影响采集轨迹的性能。
设置值越大:对路线获取的响应越敏感。
设置值越小:对线获取越不激烈。
范围:50—200
|
|
采集敏感度低 |
|
|
采集敏感度高 |
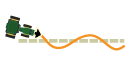
确定 AutoTrac 响应轨迹曲线的力度。此设置只会影响曲线轨迹导航的性能。
设置值越大:车轮围绕曲线转弯的半径越小(转弯越急)。
设置值越小:车辆围绕曲线转弯的半径越大。
范围:50—200
|
|
曲线敏感度低 |
|
|
曲线敏感度高 |